Real-time Nonholonomic Robot Navigation in Dynamic Environment
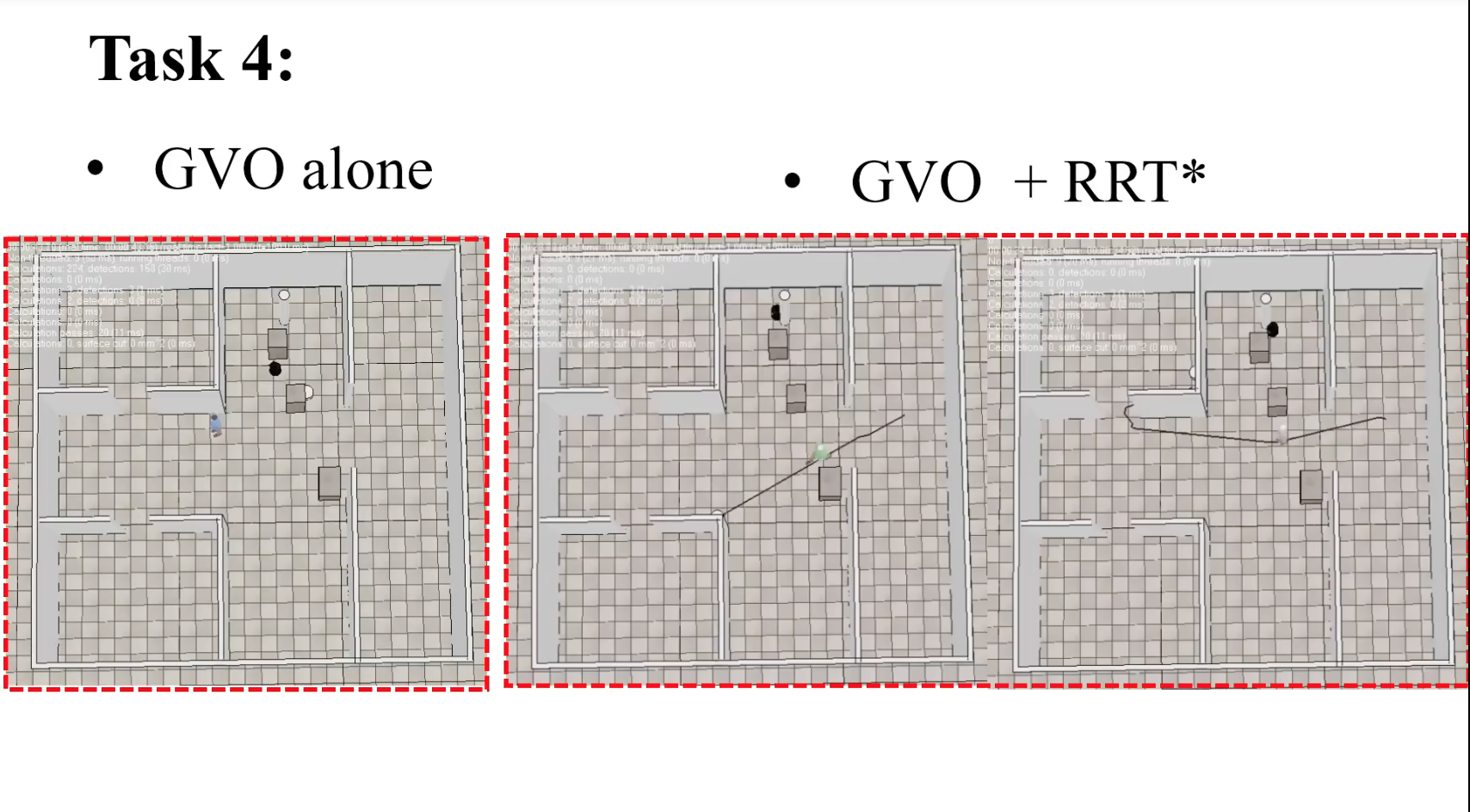
Challenges persist in nonholonomic robot navigation in dynamic environments. This presents a framework for such navigation based on the model of generalized velocity obstacles (GVO). The idea of velocity obstacles has been well studied and developed for obstacle avoidance since being proposed in 1998. Though it has been proved to be successful, most studies have assumed equations of motion to be linear, which limits their application to holonomic robots. In addition, more attention has been paid to the immediate reaction of robots, while advance planning has been neglected. By applying the GVO model to differential drive robots and by combining it with RRT*, we reduce the uncertainty of the robot trajectory, thus further reducing the range of concern, and save both computation time and running time. By introducing uncertainty for the dynamic obstacles with a Kalman filter, we dilute the risk of considering the obstacles as uniformly moving along a straight line and guarantee the safety. Special concern is given to path generation, including curvature check, making the generated path feasible for nonholonomic robots. We experimentally demonstrate the feasibility of the framework.