Underwater Robots
Nowadays technology governing an underwater field has emerged, resulting in sophisticated underwater robots. Most of the underwater robot that exists in the market is focused on industrial application for deep sea exploration and inspection. All of the control algorithms and expensive sensory are used in that platform and serve as remarkable features for the aforementioned purpose. However, most of the control algorithms need feedback from expensive sensory such as DVL(Doppler Velocity Log) and Sonar are not applicable for small size observation class underwater robot for commercial use. In this research, robust control algorithm will be investigated that will use low-cost sensors available in the market such as low cost IMU (Inertial Measurement Unit), cameras, pressure sensor, and ultrasonic sensor. The platform used for testing will be developed in-house with 4-thruster configuration assembled as in Figure 9. The main challenge of this project will be the modelling of an underwater robot platform and designing appropriate control algorithm with the aforementioned sensor. All of the sensors used will be relatively low-cost sensor so an appropriate sensor fusion technique need to be implemented to provide a reliable state estimation data for the control algorithm to stabilize the platform. Through this project, real-world application can be seen directly as a diving assistant where the robot can assist the diver when they are performing certain task, the robot can maintain its position while providing constant video, lighting and give additional safety feature for the diver.
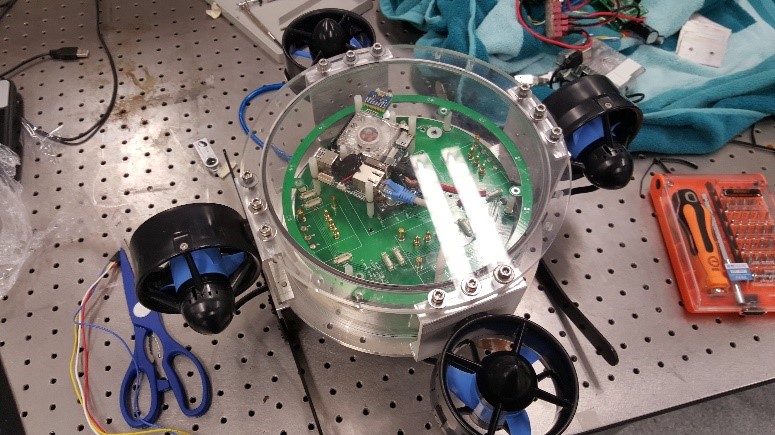
Figure 9. Inside the diving assistant

Figure 10. Hovering test of the diving assistant in swimming pool
Students in charge: Andreas Widy