Design, manufacturing and control of Vertical Take-Off and Landing (VTOL) Wing
A vertical take-off and landing (VTOL) unmanned aerial vehicles (UAVs) can be naively thought as a quadcopter but attached with a wing, as seen in Figure 4.


Figure 4. A tail-sitter VTOL UAV prototype
Such a combination will inherit both the benefits of a quadcopter which is capable of vertically taking-off and landing, and a fixed-wing airplane which possesses very high flight efficiency. As shown in Figure 5, at rest, the VTOL UAV will hover like a quadcopter with its nose pointing upward. When commanded forward flight, the UAV will tilt itself by 90 degrees to fly forward. The forward speed will in turn produce a wing lift that can cancel the gravity and maintain its flying height.
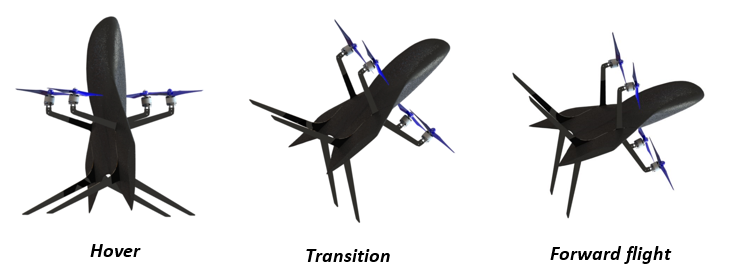
Figure 5. A VTOL UAV is transiting to forward flight from hovering condition
Due to its high agility and flight efficiency, a VTOL UAV is especially suitable for a relative long distance (around 30km) mission without considering taking-off/landing infrastructures such as run way, catapult etc. Our final goal is to design, analyze and build a prototype that has the capability to make emergency deliveries such as blood samples, first-aid medicine etc. Preliminary experiments (https://www.youtube.com/watch?v=MZK-MdUfwqk) have been conducted to verify the feasibility of the prototype. Computational Fluid Dynamics (CFDs) and wind-tunnel tests were performed to optimize the vehicle design, study its aerodynamic and dynamic behavior and establish a knowledge base for further research. An autopilot simulation system is being developed to explore control algorithm in extreme weather condition and help to develop user-friendly user experience.
Guiding Professor: Fu ZHANG
Students in charge: Ximin LV, Wa WANG, Jinni ZHOU, Haowei GU, XiaoYu CAI