Passive Robot System
This project uses 3D vision sensor to catch the finger position of an operator. Robot controller uses this position information to lead the end-effector to an expected position. Then, the operator can record the end-effector position as a teaching position to finish the teaching task. At the same time, a robot simulator running on the PC can help the operator to watch the robot status. This project can reduce the work time and workload of the robot teaching task. A demonstrative video is attached.
Students in charge: Shengyi NIE
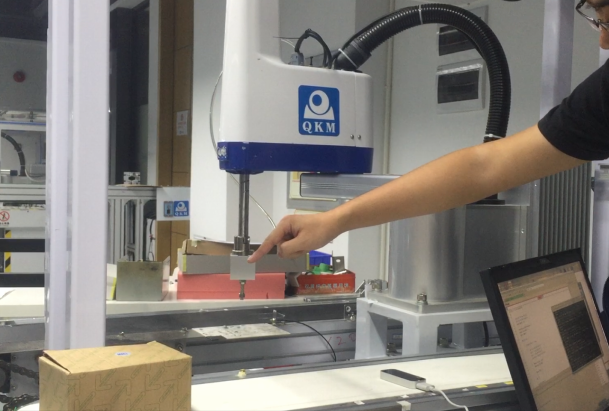
Figure 6. An operator is demonstrating movements for the robot
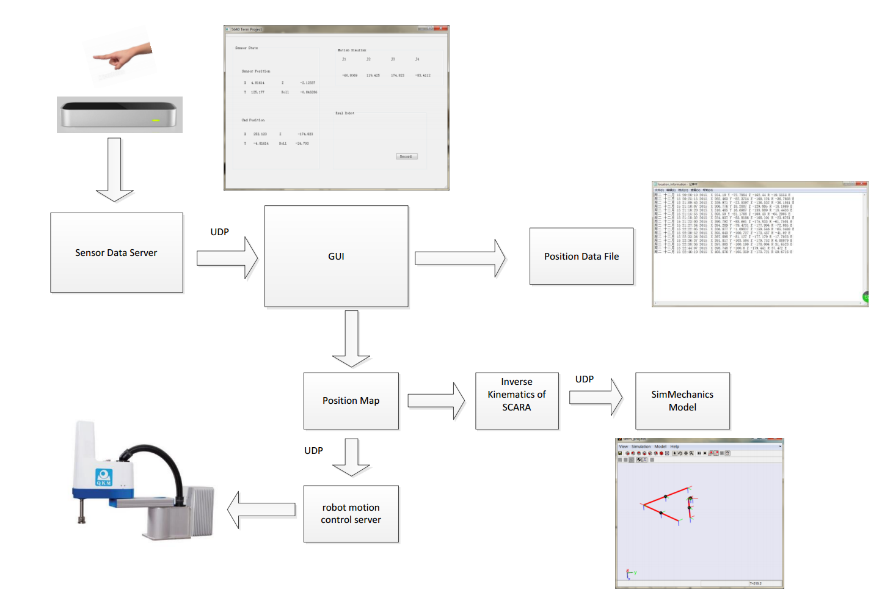
Figure 7. Schematic of the pass robot system